가변 전압 가변 주파수 제어
"오늘의AI위키"의 AI를 통해 더욱 풍부하고 폭넓은 지식 경험을 누리세요.
1. 개요
가변 전압 가변 주파수 제어(VVVF)는 전압과 주파수를 가변하여 전동기의 속도를 제어하는 기술이다. 1960년대에 개발되어 1970년대에 철도 차량에 처음 적용되었으며, 한국을 포함한 여러 국가의 철도 차량에 널리 사용되고 있다. VVVF는 교류 모터, 제어기, 운전자 인터페이스로 구성되며, 볼트-헤르츠 제어, 벡터 제어, 공간 벡터 변조 등의 제어 방식을 사용한다. VVVF는 저항 제어 방식에 비해 전력 효율이 높지만, 인버터 작동 시 소음 발생, 고조파 문제, 모터 베어링 손상 등의 단점이 있다. 최근에는 고조파를 줄이기 위한 필터링 기술, 베어링 손상을 방지하기 위한 기술이 개발되었으며, 회생 제동 기능을 통해 에너지 효율을 더욱 높일 수 있다.
1960년대 후반부터 팬, 펌프, 초지기(抄紙機) 등 산업 용도로 이용하기 시작하였고, 1977년부터 HKL M100형 전동차를 시작으로 철도차량에 적용되었으며 아시아에서는 구마모토 시 교통국 8200형 전차에 최초로 적용되었다.[8][9][10] 1990년대엔 냉장고, 에어컨 등의 가전제품에도 이용하게 되었으며 대한민국과 일본에서도 VVVF를 이용한 철도차량이 1990년대 초반에 도입되기 시작하였으며, 도카이도 신칸센을 운영한 도카이 여객철도(이하 JR도카이) 소속의 신칸센 300계 전동차와 산요 신칸센을 운영한 서일본 여객철도(이하 JR서일본) 소속의 신칸센 500계 전동차의 경우, 도시바사의 VVVF-GTO 인버터를 탑재한 바 있다.
교류 전동기는 동기 속도를 따라가는데, 과거에는 임의 주파수의 전원을 얻기 어려워 일본과 같은 곳에서는 50 Hz 또는 60 Hz의 상용 전원 주파수 고정 전원으로 기동해야 했다. 이 때문에 설계된 회전수 이외의 속도로는 운전할 수 없었고, 효율이 떨어지는 등의 문제가 있었다. 동기 속도는 회전 자계의 속도로, 2·P극 전기자 구조에서 주파수 f/P로 계산된다. 예를 들어, 60 Hz에서 4극 구조의 동기 속도는 30 rps (초당 회전수)이다.
저항 제어나 초퍼 제어 방식에 비해 전력 소비 효율이 높지만, 인버터를 통해 가변하는 과정에서 큰 소음이 발생하는 단점이 있다. VVVF 방식은 전압, 전류, 주파수를 유동적으로 조절하여 전력 손실을 줄이지만, 정차 및 발차 시 소음이 심하다는 단점이 있다.[15][44]
2. 역사
펄스 폭 변조(PWM) 가변 주파수 드라이브 프로젝트는 1960년대 핀란드의 스트룀베르그(Strömberg)에서 시작되었다. Martti Harmoinen|마르티 하르모이넨fi는 이 기술의 발명가로 여겨진다.[8][9][10] 스트룀베르그는 1973년 헬싱키 지하철에 PWM 드라이브를 판매하는 데 성공했으며, 1982년 최초의 PWM 드라이브 SAMI10이 가동되었다.[11][12][13]
3. 작동 원리
토크는 (전압 V/주파수 f)2에 비례하며, 유도 전동기에서는 정지 토크보다 작은 경우 슬립 주파수 fs에 비례한다. 동기 전동기에서는 전기자 자계와 회전자 자계의 각도 δ에 대해 sin(δ/2)에 비례한다.
이를 식으로 나타내면 다음과 같다.
즉, V/f를 일정하게 유지하면서 0에서 서서히 증가시켜 기동하면 주파수에 따라 원하는 속도로 운전할 수 있다.
최근 전력 반도체 소자의 발전으로 인버터를 통해 임의의 주파수와 전압을 가진 교류 전력을 생성할 수 있게 되었다. 이에 따라 VVVF 인버터 제어는 전기자 유기 기전력과 임피던스 강하를 고려한 전압을 공급하여 교류 모터를 구동하고, 속도 제어를 위해 공급 전압/주파수를 거의 일정하게 유지하는 방식으로 작동한다.
초기 인버터는 사각파 구동이나 펄스 방식으로 정현파를 근사했지만, 펄스 폭 변조(PWM) 방식을 통해 고조파를 줄이고 효율을 높였다. GTO 사이리스터와 같은 대전력 반도체의 스위칭 속도 문제로 인해 고속 영역에서는 "펄스 모드" 또는 "동기 모드"를 사용하고, 저속 영역에서는 "비동기 모드"를 사용하기도 한다.
직류 전동기 제어와 비교하면, VVVF 인버터 제어는 주파수와 위상이 추가될 뿐 기본적인 원리는 저항 제어나 전기자 초퍼 제어와 유사하다. "정출력 영역"과 "특성 영역" 또한 직류 전동기의 "약계자 영역=정출력 영역", "특성 영역"과 다르지 않다.
인버터 제어 대상 교류 모터는 초기에는 전자기석 동기 전동기가 사용되었으나, 최근에는 농형 삼상 유도 전동기가 주류를 이루고 있다. 일본에서는 농형 삼상 유도 전동기가 압도적이지만, 영구 자석 동기 전동기를 사용하는 차량도 등장하고 있다. 에어컨과 같은 고효율 기기에는 브러시리스 직류 모터가 사용되기도 한다. 가전 등 소형 기기에는 2상 교류 구동도 있지만, 대부분은 3상 교류이다. 유도 전동기는 저속 회전 시 효율이 낮아지므로, 직접 구동 모터(DDM)에서는 동기 전동기가 선택되기도 한다.
3. 1. 시스템 구성
VVVF 시스템은 주로 다음 세 가지 하위 시스템으로 구성된다.[2]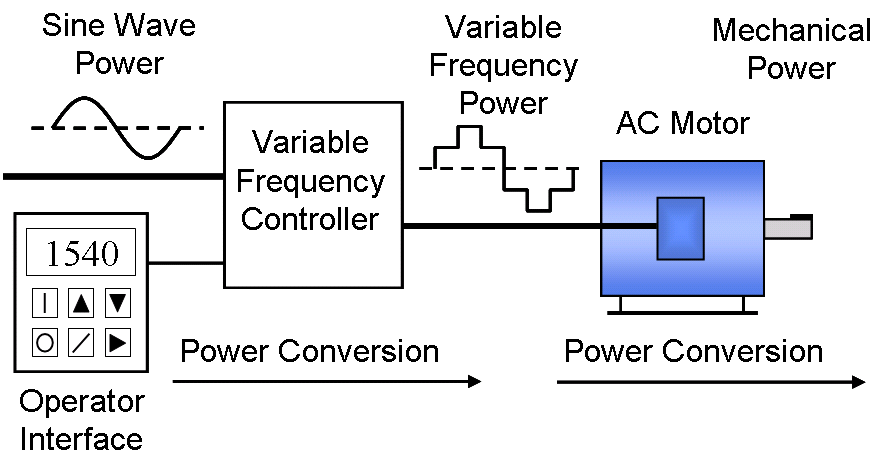
3. 2. 제어 방식
VVVF 제어는 전압과 주파수를 비례하여 변화시키는 V/f 제어를 기본으로 한다. V/f 제어는 모터의 속도를 조절하기 위해 전압과 주파수를 동시에 변화시키는 방식이다. 예를 들어, 460V, 60Hz 모터의 경우, V/f 비율은 460/60 = 7.67V/Hz가 된다. 이 비율을 유지하면서 전압과 주파수를 조절하면 모터의 속도를 제어할 수 있다.[20][21]
V/f 제어 외에도, 더 정밀한 제어가 필요한 경우에는 벡터 제어 (모터)나 직접 토크 제어(DTC)와 같은 고급 제어 방식이 사용된다. 이러한 방식들은 모터의 자속과 토크를 더욱 정밀하게 제어하여, 저속 운전이나 급격한 부하 변동과 같은 상황에서도 안정적인 성능을 제공한다.[22]
VVVF 제어는 펄스 폭 변조(PWM) 방식을 사용하여 정현파에 가까운 출력을 생성한다. PWM 제어는 캐리어 신호와 변조 사인파 신호를 비교하여 펄스 폭이 변하는 출력을 만들어낸다. 이를 통해 고조파를 줄이고, 모터의 효율을 높일 수 있다.[17][24][25]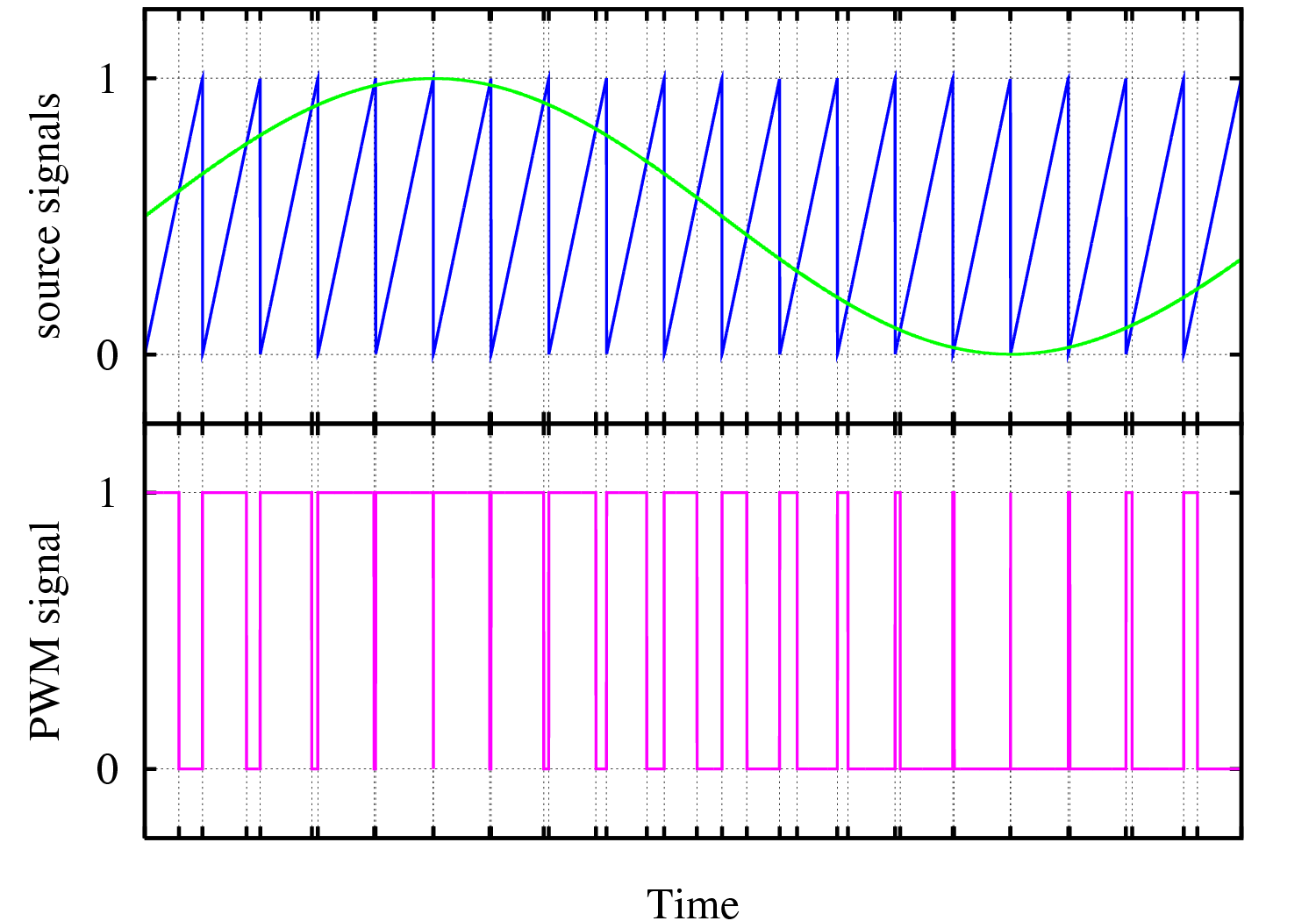
철도 차량에서는 전압과 주파수를 비례하게 제어하는 영역을 "V/f 일정 영역(정 인장력 영역)"이라고 부른다. 이 영역에서는 V/f를 일정하게 유지하면서 일정한 토크로 가속한다. 인버터의 최대 출력 전압에 도달한 이후의 고속 영역은 전압은 일정하게 유지하고 주파수만 높이는 "CVVF 영역(일정 전압 가변 주파수 영역)"이라고 한다. CVVF 영역 중에서도 전류를 일정하게 유지하며 가속하는 영역은 "정출력 영역"이라고 하며, 이 영역에서 토크는 회전 속도에 반비례한다. 정지 토크에 가까워지면 주파수만 높이는 "특성 영역"이 되며, 토크는 회전 속도의 제곱에 반비례하고 출력도 감소한다.
토크 제어에는 "V/f 일정·슬립 주파수 제어"와 "벡터 제어"가 있다. 벡터 제어는 모터에 흐르는 전류를 여자 전류와 2차 전류 성분으로 나누어 제어하는 방식으로, 슬립 주파수 제어보다 응답성이 좋고 정밀도가 높다.
3. 3. 속도 제어
Modbus, Modbus/TCP, EtherNet/IP 등 네트워크 방식이나 4-20mA, 0-10VDC, 또는 가변 저항을 사용하는 하드와이어 방식으로 VFD의 속도를 제어할 수 있다.[17][30][31] 속도 제어는 원격 제어와 로컬 제어 중 선택할 수 있는데, 원격 제어는 VFD가 키패드의 속도 명령을 무시하도록 하고, 로컬 제어는 외부 제어를 무시하고 키패드에만 따르도록 한다.
3. 4. 프로그래밍
가변 주파수 드라이브(VFD)의 작동 파라미터는 모델에 따라 전용 프로그래밍 소프트웨어, 내부 키패드, 외부 키패드 또는 SD 카드를 통해 프로그래밍할 수 있다. VFD는 작동 중에는 대부분의 프로그래밍 변경을 차단하는 경우가 많다. 설정해야 하는 일반적인 파라미터에는 모터 명판 정보, 속도 기준 소스, 온/오프 제어 소스 및 제동 제어가 포함된다. 또한 VFD는 오류 코드 및 입력 신호 상태와 같은 디버깅 정보를 제공하는 경우가 많다.
3. 5. 시동 및 소프트웨어 동작
대부분의 VFD는 자동 시작 기능을 활성화할 수 있다. 이 기능은 전원 투입 후, 오류 해결 후, 또는 비상 정지 신호 해제 후(일반적으로 비상 정지는 로직이 낮게 활성화됨)에 출력을 지정된 주파수로 구동한다. VFD를 제어하는 일반적인 방법은 자동 시작을 활성화하고 L1, L2, L3를 접촉기에 연결하는 것이다. 따라서 접촉기에 전원을 공급하면 드라이브가 켜지고 지정된 속도로 출력을 내보낸다. 드라이브의 정교함에 따라 여러 자동 시작 동작을 설정할 수 있다. 예를 들어, 드라이브는 전원이 켜지면 자동으로 시작되지만, 리셋을 수행할 때까지 비상 정지를 해제해도 자동으로 시작되지 않는다.
3. 6. 드라이브 작동
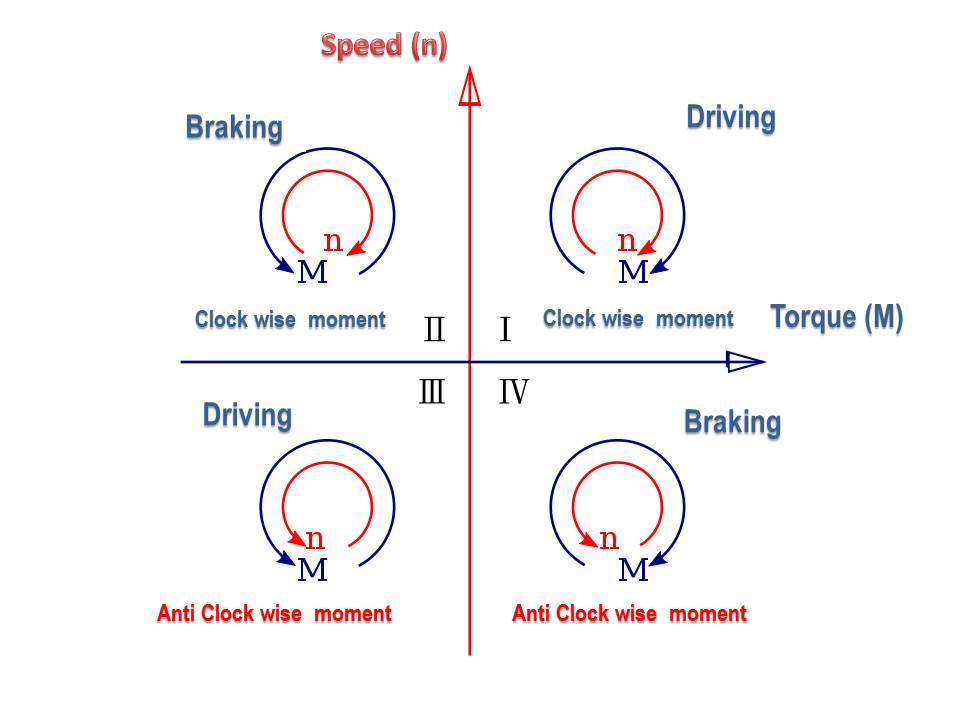
드라이브 애플리케이션은 단일 사분면, 2사분면, 4사분면으로 분류할 수 있다. 첨부된 차트의 네 사분면은 다음과 같이 정의된다.[32][33][34]
대부분의 애플리케이션은 가변 토크(예: 원심 펌프 또는 팬) 및 특정 정토크(예: 압출기) 부하와 같이 1사분면에서 작동하는 단일 사분면 부하를 포함한다.
4. 장점 및 단점
과거에는 교류 전동기의 동기 속도를 조절하기 위해 임의 주파수의 전원을 얻는 것이 어려웠다. 일본의 경우 상용 전원 주파수인 50Hz 또는 60Hz 고정 전원으로 기동해야 했기 때문에, 설계된 회전수 이외의 속도로는 운전할 수 없었다. 그러나 최근 전력 반도체 소자 기술이 발전하면서 임의의 주파수와 전압을 가진 교류 전력을 생성하는 인버터(직류-교류 변환기)를 사용할 수 있게 되었다. 이에 따라 교류 모터의 특성에 맞춰 전기자 유기 기전력과 임피던스 강하를 고려한 전압을 공급하여 임의의 속도로 운전하는 것이 가능해졌다.
4. 1. 장점
저항 제어나 초퍼 제어 방식에 비해 전력 소비 효율이 높다. 저항 제어는 전동기를 작동시키는 과정에서 많은 열이 발생하고 그 과정에서 전력 손실이 크지만, 초퍼 제어는 전력 손실이 덜하다. VVVF 방식은 전압과 전류, 주파수의 변동이 유동적이기에 전력 손실이 적다.[15]
컨트롤러의 발전은 지난 60년 동안 반도체 전력 소자의 전압 및 전류 정격과 스위칭 주파수가 급격히 증가한 것을 활용했다. 1983년에 도입된[16] 절연 게이트 양극성 트랜지스터(IGBT)는 지난 20년 동안 인버터 스위칭 소자로서 VFD를 지배하게 되었다.[17][18][19]
교류의 주파수(동기 속도)를 따라가는 교류 전동기를 사용하는 경우, 이전에는 임의 주파수의 전원을 얻기가 어려워 상용 전원 주파수(일본에서는 교류 50 Hz 또는 60 Hz) 고정 전원으로 기동했기 때문에, 설계된 회전수 이외의 임의 속도로 운전할 수 없었다.
토크의 주파수 특성은 (전압 V/주파수 f)2에 비례하며, 유도 전동기에서는 정지 토크[97]보다 미소한 경우 슬립 주파수 fs에 비례한다. 식으로 표현하면 다음과 같다.
:τ=K1・Φ・I (K1, K2: 비례 정수, Φ: 쇄교 자속, I: 전기자 전류)
:≒K2・(V/f)2・fs (V: 전압, f: 전원 주파수, fs: 슬립 주파수, 단 정지 토크보다 상당히 작은 영역)
즉, V/f를 일정하게 하여(전압과 주파수를 비례시켜) 0에서 서서히 증가시켜 기동하면 되며, 주파수에 따른 임의의 속도로 운전할 수 있다.
최근 전력 반도체 소자의 발전에 따라, 임의 주파수, 임의 전압의 교류 전력을 생성하는 인버터(직류-교류 변환기)를 얻을 수 있게 되어, 교류 모터의 특성에 맞춰 전기자 유기 기전력+임피던스 강하의 전압을 공급하여 구동함으로써 임의의 속도로 운전할 수 있게 되었다.
4. 2. 단점
인버터를 통해 가변하는 과정에서 큰 소음이 발생하는 편이다. 이는 저항제어나 쵸퍼제어 차량의 구동음 차이를 통해 알 수 있다. VVVF 방식의 철도 차량은 정차 및 발차 시 소음이 심하다.[44]
고조파 발생으로 인한 전력 품질 문제가 발생할 수 있다. 또한, 모터 베어링 전류로 인해 손상될 가능성도 있다.
5. 대한민국 철도차량 적용 사례
- 한국철도공사 311000호대 전동차 (1호선용)
- 한국철도공사 341000호대 전동차 (4호선용)
- 한국철도공사 351000호대 전동차 (수인·분당선용)
- 한국철도공사 381000호대 전동차 (동해선 광역전철용)
- 한국철도공사 391000호대 전동차 (수도권 전철 서해선용)
- 한국철도공사 392000호대 전동차 (대구권 광역철도용)
1990년대 초반, 대한민국에서도 가변 전압 가변 주파수 제어(VVVF) 방식을 채택한 철도차량이 도입되기 시작했다. 위에 언급된 한국철도공사의 전동차 외에도 다수의 도시철도 및 광역철도 차량에 이 기술이 적용되었다.
6. 인버터 제작사
7. 추가 고려 사항
가변 전압 가변 주파수 제어(VFD) 시스템을 설계하고 사용할 때, 다음과 같은 추가적인 사항들을 고려해야 한다.
AC 라인 고조파VFD의 다이오드 브리지 정류기는 교류(AC) 선 전압을 직류(DC) 전압으로 변환할 때 비선형 전류 펄스를 발생시켜 고조파 왜곡을 일으킨다.[71] VFD 부하가 작을 때는 영향이 적지만, VFD 부하 비율이 커지면 다른 전력 소비자에게 악영향을 줄 수 있다. 고조파는 모터 과열, 수명 단축, 변압기 손상 등을 유발하며, 특히 커패시터 공진을 통해 고조파를 증폭시킬 수 있다.
이 문제를 해결하기 위해 필터링 장비를 설치하거나, 전력 회사가 변전소에 필터링 장비를 설치하기도 한다. 고전력 설비에서는 다중 위상 변압기를 사용하기도 한다.[72] 또한, 능동 프론트 엔드(AFE) 방식을 통해 고조파를 줄이고 에너지 효율을 높일 수 있다.[73] 수동 또는 능동 필터를 사용해 특정 고조파 주파수를 제거할 수도 있다.[73] IEC나 IEEE 표준은 고조파 왜곡 제한을 규정하고 있으며, IEEE 표준 519는 전압 총 고조파 왜곡 (THD)을 5% 이하로 제한한다.[74]
스위칭 주파수 폴드백 및 소음 평활화일부 드라이브는 스위칭 주파수를 줄여 IGBT 발열을 줄이는 기능을 제공한다.[75] 일반적으로 2,000 ~ 16,000 Hz 범위의 반송파 주파수가 사용되며, 높은 주파수는 더 나은 사인파 근사를 제공하지만 스위칭 손실을 증가시킨다.[76] 또한, 스위칭 주파수에 무작위적인 변화를 주어 소음을 분산시키는 기능도 있다.
장거리 케이블 영향PWM VFD 출력 전압의 빠른 상승 시간은 전송선 효과를 유발한다. 케이블과 모터 임피던스 차이로 인해 펄스가 반사되어 긴 케이블에서 과전압을 발생시키고, 이는 절연 파괴를 일으킬 수 있다.[77] 460V 또는 575V 시스템에서는 VFD와 모터 사이의 최대 케이블 거리가 약 50m로 권장된다. SiC MOSFET 구동 장치는 더 짧은 케이블에서도 과전압이 발생할 수 있다.[77]
장거리 과전압 해결책은 다음과 같다.[78][79][80][81]
- 케이블 길이 최소화
- 반송파 주파수 낮추기
- dV/dt 필터 또는 LCR 로우패스 정현파 필터 설치
- 인버터용 모터 사용
모터 베어링 전류PWM 드라이브는 고주파 공통 모드 전압 및 전류를 발생시켜 모터 베어링에 문제를 일으킬 수 있다.[87] 고주파 전압이 베어링을 통해 흐르면 스파크가 발생하여 베어링 레이스를 침식시킨다. 큰 모터에서는 분산 정전 용량으로 인해 순환형 베어링 전류가 발생하고, 접지 불량은 샤프트 대 접지 베어링 전류를 유발한다.[88]
고주파 베어링 전류 손상 방지 방법은 다음과 같다.
- 우수한 케이블 연결 및 접지 (차폐 케이블, 샤프트 접지 브러시, 전도성 그리스 사용)
- 베어링 전류 차단 (절연 베어링, 정전기 차폐 유도 전동기)
- 공통 모드 초크를 이용한 필터링 또는 3레벨 인버터/매트릭스 컨버터 사용[88][89]
동적 제동 및 회생 제동VFD는 정지 시퀀스에서 주파수와 전압을 감소시켜 모터를 정지시킨다. 이때 제동 토크를 사용하여 감속 속도를 높일 수 있다.[37] 추가적인 제동은 제동 회로를 통해 에너지를 열로 소산시켜 얻을 수 있다. 4사분면 정류기(능동 프론트 엔드)를 사용하는 VFD는 에너지를 AC 라인으로 다시 주입하여 제동한다.[37]
부하가 전동기를 동기 속도보다 빠르게 구동하면 전동기는 발전기 역할을 하고, 이 전력은 DC 링크로 반환된다. 브레이킹 DC 초퍼는 이 전력을 저항에서 열로 소모시킨다.[34] 동적 제동은 에너지를 낭비하지만, 회생 제동은 에너지를 AC 라인에 주입하여 회수한다. 단, 회생 제동 드라이브는 초기 비용이 더 높다.[90]
재생형 드라이브재생형 AC 드라이브는 오버홀링 부하의 제동 에너지를 회수하여 전력 시스템으로 반환한다.[92] 사이클로컨버터, 셰르비우스 드라이브 등은 가능하지만, 전압원 인버터는 추가 변환기가 필요하다.[93][94] 재생은 에너지 회수 가치가 클 때, 잦은 제동 및 시작이 필요할 때 유용하며, 오버홀링 부하 속도 제어가 필요한 곳에 널리 사용된다.[2][3][95]
예시는 다음과 같다.
- 컨베이어 벨트 드라이브
- 크레인
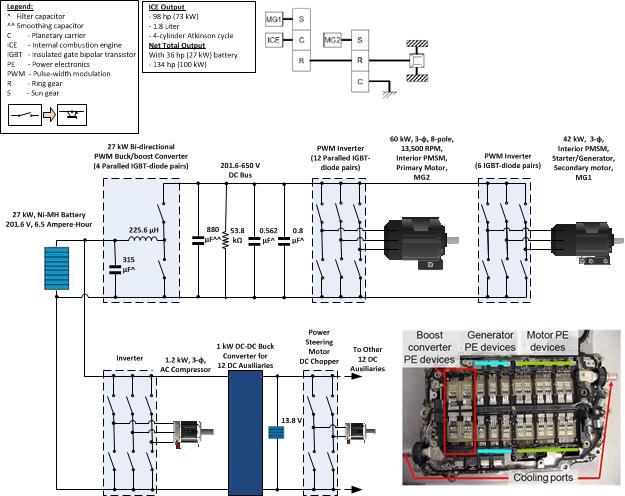
- 하이브리드 전기 자동차 (하이브리드 시너지 드라이브 참조):
300px
7. 1. AC 라인 고조파
VFD의 다이오드 브리지 정류기는 AC 선 전압을 DC 전압 출력으로 변환하는데, 이때 비선형 반-위상 전류 펄스를 중첩시켜 AC 선 입력에 고조파 전류 왜곡을 일으키고, 이는 전압 왜곡으로 이어진다.[71] VFD 부하가 전력 시스템에 비해 상대적으로 작을 때는 AC 그리드의 VFD 고조파 왜곡 영향이 허용 범위 내에 있을 수 있다. 저전압 네트워크에서는 단상 장비로 인한 고조파가 3상 다이오드 브리지 고조파에 의해 부분적으로 상쇄되기도 한다.[71]그러나 VFD와 같은 비선형 부하의 비율이 전체 부하나 AC 전원 공급 장치의 강성에 비해 상대적으로 클 경우, 이는 다른 전력 회사 고객에게 제공되는 AC 전원 파형에 부정적인 영향을 줄 수 있다. 고조파는 일반적인 고정 속도 AC 모터의 손실을 증가시켜 과열 및 수명 단축을 유발하고, 변전소 변압기 및 보상 커패시터에도 악영향을 미친다. 특히 커패시터는 공진 조건을 유발하여 고조파 수준을 증폭시킬 수 있다.
이러한 문제를 해결하기 위해 VFD 부하 소유자는 필터링 장비를 설치하여 고조파 왜곡을 줄일 수 있다. 전력 회사는 대량의 VFD 장비가 사용되는 변전소에 자체 필터링 장비를 설치하기도 한다. 고전력 설치에서는 다중 위상 시프트 권선을 갖는 변압기에서 다중 펄스 정류기-브리지 VFD를 공급하여 고조파 왜곡을 줄일 수 있다.[72]
표준 다이오드 브리지 정류기를 IGBT 스위칭 장치 출력을 사용하는 인버터를 미러링하는 양방향 IGBT 스위칭 장치 브리지로 교체하는 방법(능동 프론트 엔드, AFE)도 있다. AFE는 PWM 제어와 적절한 입력 리액터를 통해 AC 선 전류 파형을 거의 정현파로 만들 수 있으며, DC 측에서 AC 그리드로 에너지를 재생하여 드라이브 효율을 높인다.[73]
이 외에도 수동 또는 능동 필터를 사용하여 고조파를 완화할 수 있다. 수동 필터는 저역 통과 필터 LC 필터 트랩 설계를 통해 특정 고조파 주파수에 맞게 조정된다.[73]
IEC나 IEEE 표준에 따라 고조파 왜곡 제한을 부과하는 것이 일반적이다. IEEE 표준 519는 개별 주파수 전압 고조파의 최대값을 기본파의 3% 이하, 전압 총 고조파 왜곡 (THD)을 5% 이하로 제한한다.[74]
7. 2. 스위칭 주파수 폴드백
일부 드라이브는 4 kHz의 기본 스위칭 주파수 설정을 사용한다. 드라이브의 스위칭 주파수(반송파 주파수)를 줄이면 IGBT에서 발생하는 열을 줄일 수 있다.[75]PWM 스위칭 간격을 설정하기 위해 원하는 출력 주파수의 최소 10배의 반송파 주파수가 사용된다. 2,000 ~ 16,000 Hz 범위의 반송파 주파수는 저전압(LV) (600V AC 미만) VFD에 일반적이다. 더 높은 반송파 주파수는 더 나은 사인파 근사를 생성하지만 IGBT에서 더 높은 Schaltverluste|스위칭 손실de를 발생시켜 전체 전력 변환 효율을 감소시킨다.[76]
7. 3. 소음 평활화
일부 드라이브는 스위칭 주파수에 무작위적인 변화를 주어 소음을 완화하는 기능을 켤 수 있다. 이는 음향 소음을 주파수 범위에 분산시켜 소음의 최대 강도를 낮춘다.7. 4. 장거리 케이블 영향
PWM VFD의 반송파 주파수 펄스 출력 전압은 빠른 상승 시간을 유발하며, 이는 전송선 효과를 고려해야 한다. 케이블과 모터의 임피던스 차이로 인해 펄스는 모터 단자에서 케이블로 다시 반사되는 경향이 있다. 그 결과, 긴 케이블에서는 DC 버스 전압의 두 배 또는 정격 선 전압의 최대 3.1배에 달하는 과전압이 발생하여 케이블과 모터 권선에 높은 스트레스를 가하고, 결국 절연 파괴를 일으킬 수 있다.[77]230V 이하 정격의 3상 모터는 이러한 장거리 과전압으로부터 적절히 보호되지만, 460V 또는 575V 시스템 및 3세대 0.1마이크로초 상승 시간 IGBT를 갖춘 인버터의 경우, VFD와 모터 사이의 최대 권장 케이블 거리는 약 50m 또는 150피트이다. 새롭게 등장하는 SiC MOSFET 구동 장치의 경우, 3미터와 같이 짧은 케이블 길이에서도 상당한 과전압이 관찰되었다.[77]
장거리로 인한 과전압에 대한 해결책은 다음과 같다.[78][79][80][81]
- 케이블 길이 최소화
- 반송파 주파수 낮추기
- dV/dt 필터 설치
- 인버터용 모터 사용(상승 시간이 0.1마이크로초 이하이고 피크 크기가 1,600V인 펄스 열을 견딜 수 있도록 600V 정격)
- LCR 로우패스 정현파 필터 설치
AC 구동 장치에 대한 최적의 PWM 반송파 주파수를 선택하는 것은 소음, 열, 모터 절연 스트레스, 공통 모드 전압으로 인한 모터 베어링 전류 손상, 부드러운 모터 작동 및 기타 요소를 균형 있게 유지하는 작업과 관련된다. LCR 로우패스 정현파 필터 또는 dV/dt 필터를 사용하여 추가적인 고조파 감쇠를 얻을 수 있다.[82][83][84][85]
7. 5. 모터 베어링 전류
PWM 드라이브는 고주파 공통 모드 전압 및 전류와 관련되어 있어 모터 베어링에 문제를 일으킬 수 있다.[87] 이러한 고주파 전압이 베어링을 통해 접지로 흐르면, 베어링 볼과 베어링 레이스 사이에 금속 이동 또는 방전 가공(EDM) 스파크가 발생한다. 시간이 지나면서 이 스파크는 베어링 레이스를 침식시켜 플루팅 패턴을 만든다. 큰 모터에서는 권선의 분산 정전 용량이 모터 샤프트 끝을 통과하는 고주파 전류의 경로를 제공하여 순환형 베어링 전류를 유발한다. 모터 고정자의 접지가 불량하면 샤프트 대 접지 베어링 전류가 발생할 수 있다. 접지가 불량한 구동 장비를 가진 소형 모터는 고주파 베어링 전류에 취약하다.[88]이러한 고주파 베어링 전류 손상을 막기 위해, 다음과 같은 세 가지 방법이 사용된다.
- 우수한 케이블 연결 및 접지
- 베어링 전류 차단
- 공통 모드 초크를 이용한 공통 모드 전류 필터링 또는 댐핑
우수한 케이블 연결 및 접지 방법에는 차폐된 대칭 기하 구조 전원 케이블을 사용하여 모터에 전원을 공급하고, 샤프트 접지 브러시를 설치하며, 전도성 베어링 그리스를 사용하는 것이 포함된다. 절연 베어링과 특수 설계된 정전기 차폐 유도 전동기를 설치하여 베어링 전류를 차단할 수 있다. 연자성 코어를 3상에 삽입하여 공통 모드 또는 모터 베어링 전류에 대한 고주파 임피던스를 제공함으로써 고주파 베어링 전류를 필터링하고 댐핑할 수 있다. 또 다른 접근 방식은 표준 2레벨 인버터 드라이브 대신 3레벨 인버터 드라이브 또는 매트릭스 컨버터를 사용하는 것이다.[88][89]
7. 6. 동적 제동 및 회생 제동
가변 전압 가변 주파수 제어(VFD)를 사용하여 정지 시퀀스를 실행할 때, 모터에 인가되는 주파수와 전압은 제어된 속도로 감소한다. 주파수가 0에 가까워지면 모터는 정지한다. 이때, 모터가 단순히 꺼지고 관성으로 움직이는 것보다 조금 더 빠르게 부하를 감속시키기 위해 약간의 제동 토크가 사용될 수 있다.[37]추가적인 제동 토크는 제동 회로(트랜지스터로 제어되는 저항기)를 통해 얻을 수 있는데, 이 회로는 제동 에너지를 소산시키는 역할을 한다. 4사분면 정류기(능동 프론트 엔드)를 사용하는 VFD는 역 토크를 가하여 에너지를 AC 라인으로 다시 주입함으로써 부하를 제동할 수 있다.[37]
드라이브에 의해 생성된 토크는 유도 전동기를 동기 속도보다 낮은 속도로 작동하게 한다. 만약 부하가 전동기를 동기 속도보다 빠르게 구동하면, 전동기는 발전기 역할을 하여 기계적 에너지를 전기 에너지로 변환한다. 이 전력은 드라이브의 DC 링크 요소(캐패시터 또는 리액터)로 반환된다. DC 링크에 연결된 전자 전력 스위치 또는 브레이킹 DC 초퍼는 이 전력이 저항 세트에서 열로 소모되는 것을 제어한다. 냉각 팬은 저항 과열을 방지하는 데 사용될 수 있다.[34]
동적 제동은 제동 에너지를 열로 변환하여 낭비하는 반면, 회생 제동은 이 에너지를 AC 라인에 주입하여 에너지를 회수한다. 그러나 회생 제동 드라이브는 초기 비용이 상대적으로 더 많이 든다.[90]
7. 7. 재생형 드라이브
재생형 AC 드라이브는 지정된 모터 속도보다 빠르게 움직이는 부하(''오버홀링'' 부하)의 제동 에너지를 회수하여 전력 시스템으로 반환하는 기능을 가지고 있다.[92]사이클로컨버터, 셰르비우스 드라이브, 매트릭스 드라이브, CSI 드라이브 및 LCI 드라이브는 본질적으로 부하에서 라인으로 에너지를 반환할 수 있는 반면, 전압원 인버터는 전원에 에너지를 반환하기 위해 추가 변환기가 필요하다.[93][94]
재생은 회수된 에너지의 가치가 재생 시스템의 추가 비용에 비해 클 경우에만 VFD에서 유용하며,[93] 시스템에서 잦은 제동 및 시작이 필요한 경우에 유용하다. 재생형 VFD는 오버홀링 부하의 속도 제어가 필요한 곳에 널리 사용된다.[2][3][95]
몇 가지 예시는 다음과 같다.
- 제조용 컨베이어 벨트 드라이브: 몇 분마다 정지하며, 정지하는 동안 부품이 올바르게 조립되면 벨트가 이동한다.
- 크레인: 호이스트 모터가 자주 정지하고 역전하며, 하강 중 부하를 늦추기 위해 제동이 필요하다.
- 모든 유형의 플러그인 및 하이브리드 전기 자동차: (하이브리드 시너지 드라이브 참조).
8. VFD 유형 및 등급
전력 반도체 소자의 발전에 따라, 인버터(직류-교류 변환기)를 통해 임의의 주파수와 전압을 가진 교류 전력을 생성하여 교류 모터의 속도를 제어할 수 있게 되었다. VVVF 인버터 제어는 공급 전압과 주파수의 비율을 일정하게 유지하여 속도를 제어하는 방식이다.
초기에는 반도체 용량의 한계로 사각파 구동이나 정현파 근사 방식을 사용했지만, PWM 방식 등을 통해 정현파에 가까운 파형을 만들어 고조파로 인한 손실과 악영향을 줄였다. 대전력 반도체의 스위칭 속도 문제로 인해 고속 영역에서는 펄스 모드(동기 모드)를, 저속 영역에서는 비동기 모드를 사용한다.
VFD는 다음과 같이 분류할 수 있다.
- '''일반적인 토폴로지''':
- 전압원 인버터(VSI) 드라이브: 커패시터 버스를 통해 인버터에 강성 전압 입력을 공급한다.
- 전류원 인버터(CSI) 드라이브: 직렬-인덕터 연결을 통해 인버터에 강성 전류 입력을 공급한다.
- 6단계 인버터 드라이브: 현재는 대부분 사용되지 않으며, VSI 또는 CSI 유형일 수 있다.
- 부하 정류 인버터(LCI) 드라이브: DC 링크 인덕터 회로를 통해 에너지를 저장하여 두 번째 SCR 브리지의 인버터와 과여자 동기기의 강성 준 사인파 6단계 전류 출력을 공급한다.
- 사이클로컨버터 또는 매트릭스 컨버터(MC) 토폴로지: 중간 DC 링크를 사용하지 않는 AC-AC 컨버터이다.
- 이중 공급 슬립 회수 시스템 토폴로지: 정류된 슬립 전력을 평활 리액터에 공급하여 인버터를 통해 AC 전력망에 전력을 공급한다.
- '''부하 토크 및 전력 특성''':
- 가변 토크: 원심 팬, 펌프, 송풍기 등
- 정토크: 컨베이어, 용적형 펌프 등
- 정출력: 공작 기계, 견인 장치 등
유도 전동기에서 토크는 (전압 V/주파수 f)2에 비례하며, 정지 토크보다 미소한 경우 슬립 주파수 fs에 비례한다. 동기 전동기에서는 전기자 자계와 회전자 자계의 각도 δ에 관해서 sin(δ/2)에 비례한다. 수식은 다음과 같다.
: τ=K1・Φ・I (K1, K2: 비례 정수, Φ: 쇄교 자속, I: 전기자 전류)
: ≒K2・(V/f)2・fs (V: 전압, f: 전원 주파수, fs: 슬립 주파수, 단 정지 토크보다 상당히 작은 영역)
: 동기 전동기에서는 τ≒K・(V/f)2・sin(δ/2)
즉, V/f를 일정하게 하여 (전압과 주파수를 비례시켜) 0에서 서서히 증가시켜 기동하면 되며, 주파수에 따른 임의의 속도로 운전할 수 있다.
8. 1. 일반적인 토폴로지
AC 드라이브는 다음과 같은 일반적인 토폴로지에 따라 분류할 수 있다.- '''전압원 인버터(VSI) 드라이브 토폴로지''' (그림 참조): VSI 드라이브에서 다이오드 브리지 컨버터의 DC 출력은 커패시터 버스에 에너지를 저장하여 인버터에 강성 전압 입력을 공급한다. 대부분의 드라이브는 PWM 전압 출력을 갖는 VSI 유형이다.[52]
- '''전류원 인버터(CSI) 드라이브 토폴로지''' (그림 참조): CSI 드라이브에서 SCR 브리지 컨버터의 DC 출력은 직렬-인덕터 연결에 에너지를 저장하여 인버터에 강성 전류 입력을 공급한다. CSI 드라이브는 PWM 또는 6단계 파형 출력으로 작동할 수 있다.
- '''6단계 인버터 드라이브 토폴로지''' (그림 참조):[53] 현재는 대부분 사용되지 않지만, 6단계 드라이브는 VSI 또는 CSI 유형일 수 있으며, 펄스 진폭 변조(PAM) 드라이브,[52] 구형파 드라이브 또는 DC 초퍼 인버터 드라이브라고도 한다.[53] 6단계 드라이브에서 SCR 브리지 컨버터의 DC 출력은 커패시터 버스 및 직렬 리액터 연결을 통해 평활화되어 달링턴 쌍 또는 IGBT 인버터를 통해 유도 전동기에 준 사인파, 6단계 전압 또는 전류 입력을 공급한다.[54]
- '''부하 정류 인버터(LCI) 드라이브 토폴로지''': LCI 드라이브(특수한 CSI 케이스)에서 SCR 브리지 컨버터의 DC 출력은 DC 링크 인덕터 회로를 통해 에너지를 저장하여 두 번째 SCR 브리지의 인버터와 과여자 동기기의 강성 준 사인파 6단계 전류 출력을 공급한다. 저비용 SCR-사이리스터 기반 LCI로 구동되는 동기 전동기 드라이브는 최대 100MW 정격의 고출력 저동적 성능 팬, 펌프 및 압축기 응용 분야에 자주 사용된다.[55]
- '''사이클로컨버터 또는 매트릭스 컨버터(MC) 토폴로지''' (그림 참조): 사이클로컨버터 및 MC는 중간 DC 링크를 사용하여 에너지를 저장하지 않는 AC-AC 컨버터이다. 사이클로컨버터는 6 펄스 구성으로 세 개의 반 병렬 연결된 SCR 브리지를 통해 삼상 전류원으로 작동하며, 각 사이클로컨버터 상은 고정 선 주파수 AC 전압을 가변 부하 주파수의 교류 전압으로 선택적으로 변환한다. MC 드라이브는 IGBT 기반이다.
- '''이중 공급 슬립 회수 시스템 토폴로지''': 이중 공급 슬립 회수 시스템은 정류된 슬립 전력을 평활 리액터에 공급하여 인버터를 통해 AC 전력망에 전력을 공급하며, 전동기의 속도는 DC 전류를 조정하여 제어된다.
아래는 표 1~3 범례이다.
8. 2. 제어 플랫폼
대부분의 드라이브는 다음 제어 플랫폼 중 하나 이상을 사용한다.[49][56]- 스칼라 제어
- 벡터 제어 (VC)
- 자속 기준 제어 (FOC)
- 직접 토크 제어 (DTC)
최근 전력 반도체 소자의 발전에 따라, 임의 주파수, 임의 전압의 교류 전력을 생성하는 인버터(직류-교류 변환기)를 얻을 수 있게 되어, 교류 모터의 특성에 맞춰 전기자 유기 기전력과 임피던스 강하의 전압을 공급하여 구동함으로써 임의의 속도로 운전할 수 있게 되었다. 전기자 유기 기전력은 자계가 일정하다면 회전수, 즉 주파수에 비례하므로, 공급 전압/주파수를 거의 일정하게 하여 속도 제어를 하는 것이 VVVF 인버터 제어의 기본이다.
초기 인버터 구동에서는 반도체의 용량이 작아, 사각파 구동이나 수 펄스로 정현파를 근사했지만, 더 나아가 속도 0에서 서서히 기동시키는 저속 대전력에서는 PWM 방식 등으로 정현파에 가깝게 하여 고조파의 손실과 악영향을 작게 하여 기동했다. 그러나 GTO 사이리스터 등 대전력 반도체의 스위칭 속도가 느리기 때문에, 속도를 올리면 1 사이클 1 펄스에 도달하여 회전수와 반송파 주파수가 간섭하므로, 이를 피하기 위해 고속 영역에서는 반송파 주파수를 회전수의 정수배로 했다. 이를 "펄스 모드", "동기 모드"라고 부르며, 저속부의 정수배 관계가 없는 동작을 "비동기 모드"라고 부른다.
8. 3. 부하 토크 및 전력 특성
가변 주파수 드라이브는 부하 토크 및 전력 특성에 따라 다음과 같이 분류할 수 있다.- '''가변 토크''': 원심 팬, 펌프, 송풍기 등
- '''정토크''': 컨베이어, 용적형 펌프 등
- '''정출력''': 공작 기계, 견인 장치 등
토크의 주파수 특성은 (전압 V/주파수 f)2에 비례하며, 유도 전동기에서는 정지 토크[97]보다 미소한 경우 슬립 주파수 fs에 비례한다. 동기 전동기에서는 전기자 자계와 회전자 자계의 각도 δ에 관해서 sin(δ/2)에 비례한다.
수식으로 표현하면 다음과 같다.
: τ=K1・Φ・I (K1, K2: 비례 정수, Φ: 쇄교 자속, I: 전기자 전류)
: ≒K2・(V/f)2・fs (V: 전압, f: 전원 주파수, fs: 슬립 주파수, 단 정지 토크보다 상당히 작은 영역)
: 동기 전동기에서는 τ≒K・(V/f)2・sin(δ/2)
즉, V/f를 일정하게 하여 (전압과 주파수를 비례시켜) 0에서 서서히 증가시켜 기동하면 되며, 주파수에 따른 임의의 속도로 운전할 수 있다.
철도 차량에서는 이 전압·주파수 비례 영역을 "'''V/f 일정 영역''' (정 인장력 영역)"이라고 부르며, V/f를 일정하게 유지하면서 일정 토크로 가속을 수행한다. 인버터의 최대 출력과 최대 전압 이후의 고속 영역은 전압 일정으로 주파수를 올리므로 "'''CVVF 영역''' (일정 전압 가변 주파수 영역)"이라고 부른다. CVVF 영역 중 전류 일정으로 가속을 계속하는 영역은 유도 전동기라면 슬립 주파수를 늘려 가속하지만, 공급 전력으로는 일정 (=전압 일정 × 전류 일정)하므로 "'''정출력 영역'''"이라고 부르며, 토크는 회전 속도에 반비례한다. 정지 토크(탈출 토크)에 가까워지면 슬립 주파수는 늘릴 수 없게 되어, 주파수만을 늘리는 "'''특성 영역'''"이 되며, 토크는 회전 속도의 제곱에 반비례함과 동시에 출력도 떨어진다.
참조
[1]
서적
Solid-State AC Motor Controls
Marcel Dekker, Inc.
[2]
서적
Controlling Power Transmission Systems
Penton/IPC
[3]
서적
Electrical Control Systems in Industry
https://archive.org/[...]
McGraw-Hill, Inc.
[4]
서적
Application Guide for AC Adjustable Speed Drive Systems
https://www.nema.org[...]
National Electrical Manufacturers Association
2008-03-27
[5]
컨퍼런스
What's New In Medium Voltage Drives
https://site.ieee.or[...]
2022-01-28
[6]
웹사이트
Medium Voltage Integrated Drive and Motor
https://www.energy.g[...]
[7]
웹사이트
Energy efficiency makes a difference
http://www02.abb.com[...]
2017-05-01
[8]
웹사이트
Muistokirjoitus {{!}} Martti Harmoinen 1934–2023
https://www.hs.fi/mu[...]
2023-06-22
[9]
웹사이트
Taajuusmuuttajasta tuli Suomen suuri innovaatio - IN0619
https://insinoori-le[...]
2023-06-22
[10]
웹사이트
Suomi100-innovaatiot, sija 5: taajuusmuuttaja
https://etn.fi/index[...]
2023-06-22
[11]
웹사이트
Edelläkävijät osaavat lukea signaaleja ympärillään
https://trafiikki.fi[...]
2023-06-22
[12]
웹사이트
Tekniikan Maailma
https://tekniikanmaa[...]
2023-06-22
[13]
웹사이트
Esinekummi tekee näkyväksi tekniikan ja teollisuuden tarinaa
https://tekniikanmus[...]
2023-06-22
[14]
문서
NEMA Guide
[15]
문서
Campbell
[16]
서적
Power Electronics and Motor Drives : Advances and Trends
https://archive.org/[...]
Academic
[17]
학술지
AC Drives Stay Vital for the 21st Century
https://www.controle[...]
2004-09-01
[18]
컨퍼런스
Keynote Presentation for the 25th Anniversary of The Wisconsin Electric Machines and Power Electronics Consortium (WEMPEC)
WEMPEC
2008-05-18
[19]
학술지
AC Adjustable-Speed Drives at the Millennium: How Did We Get Here?
http://digital.libra[...]
2001-01
[20]
웹사이트
Basics of AC drives
http://www3.sea.siem[...]
2012-04-18
[21]
서적
Adjustable Speed AC Drive Systems
IEEE Press
[22]
웹사이트
History of Power Electronics for Motor Drives in Japan
http://www.ieeeghn.o[...]
2012-04-18
[23]
컨퍼런스
Global Energy Scenario and Impact on Power Electronics In the 21st Century
https://ieeexplore.i[...]
IEEE
2012-02-08
[24]
문서
Bose (2006)
[25]
문서
Campbell
[26]
문서
Bose (1980)
[27]
문서
Basics of AC Drives
[28]
웹사이트
Film capacitors – Short Definition of Terms
http://www.epcos.com[...]
2012-05-22
[29]
문서
Basics of AC Drives
[30]
학술지
AC Adjustable Speed Drives
2007-11-01
[31]
문서
Campbell
[32]
웹사이트
Technical guide No. 8 – Electrical Braking
https://library.e.ab[...]
2012-04-20
[33]
웹사이트
Energy Regeneration
http://www.freescale[...]
2012-04-20
[34]
문서
Basics of AC Drives
[35]
문서
Energy Regeneration
[36]
슬라이드
Energy Regeneration
[37]
서적
Campbell
[38]
논문
The Past, Present, and Future of Power Electronics
2009-06-00
[39]
웹사이트
Adjustable Speed Drives: Drive Up Energy Efficiency
https://web.archive.[...]
ChemicalProcessing.com
2012-01-27
[40]
논문
Power Electronics and Motor Drives Recent Progress and Perspective
2009-02-00
[41]
웹사이트
Guide to Variable Speed Drives – Technical Guide No. 4
https://library.e.ab[...]
2012-01-27
[42]
웹사이트
Motoring Ahead
http://www.lead-cent[...]
2012-04-18
[43]
웹사이트
Energy-Efficiency Policy Opportunities for Electric Motor-Driven Systems
https://web.archive.[...]
International Energy Agency
2012-01-27
[44]
슬라이드
Basics of AC drives
[45]
웹사이트
DC or AC Drives? A Guide for Users of Variable-Speed drives (VSDs)
http://www05.abb.com[...]
2012-03-22
[46]
웹사이트
AC and DC Variable Speed Drives Application Considerations
https://web.archive.[...]
2012-03-22
[47]
서적
The Control Techniques Drives and Controls Handbook
https://archive.org/[...]
Institution of Engineering and Technology
[48]
웹사이트
General Purpose Permanent Magnet Motor Drive without Speed and Position Sensor
https://web.archive.[...]
2012-09-07
[49]
웹사이트
A Guide to Standard Medium Voltage Variable Speed Drives, Part 2
https://library.e.ab[...]
2012-03-16
[50]
논문
An Overview of Medium Voltage AC Adjustable Speed Drives and IEEE Std. 1566 – Standard for Performance of Adjustable Speed AC Drives Rated 375 kW and Larger
IEEE Southern Alberta Chapter
2011-06-00
[51]
논문
Power Electronic Circuit Topology
1988-04-00
[52]
서적
Electrician's Technical Reference: Variable Frequency Drives
Delmar Thomson Learning
[53]
서적
Drury
[54]
간행물
Understanding VSDs with ESPs – A Practical Checklist
Society of Petroleum Engineers
[55]
서적
High-power converters and AC drives
https://ieeexplore.i[...]
Wiley-IEEE Press
2017
[56]
서적
Drury
[57]
웹사이트
ACS800, single drives, 0.55 to 5600 kW Catalog
https://library.e.ab[...]
2013
[58]
웹사이트
High-Power Converters and AC Drives
http://www.ee.ryerso[...]
IEEE PES
2012-02-03
[59]
논문
Medium-Voltage AC Drives Shed Custom Image
2000-02-01
[60]
논문
Standard 1566 for (Un)Familiar Hands
2008-01-00
[61]
슬라이드
Wu
[62]
서적
Bose (2006)
[63]
웹사이트
Variable Speed Pumping, A Guide to Successful Applications, Executive Summary
https://web.archive.[...]
USDOE – Europump – Hydraulic Institute
2012-01-29
[64]
논문
2005 European Conference on Power Electronics and Applications
[65]
웹사이트
TMEiC Medium Voltage Drive Evolution
https://www.tmeic.co[...]
2012-02-03
[66]
슬라이드
Wu
[67]
서적
Power Electronics Handbook: Devices, Circuits, and Applications
https://archive.org/[...]
Academic
[68]
논문
Multilevel Inverters: A Survey of Topologies, Controls, and Applications
[69]
웹사이트
Two-Level and Three-Level Converter Comparison in Wind Power Application
http://www.elkraft.n[...]
[70]
논문
Powering the Future of Industry: High-Power Adjustable Speed Drive Topologies
2012-07-00
[71]
논문
Harmonic Cancellation by Mixing Non-Linear Single-Phase and Three-Phase Loads
2000-01-01
[72]
웹사이트
Guide to Harmonics with AC Drives – Technical Guide No. 6
http://www05.abb.com[...]
2009-07-29
[73]
서적
IEEE Recommended Practices and Requirements for Harmonic Control in Electrical Power Systems
IEEE
[74]
문서
IEEE 519
[75]
웹사이트
ACH550 Switching Frequency Foldback
https://library.e.ab[...]
[76]
논문
Challenges and solutions of protecting variable speed drive motors
https://cms-cdn.seli[...]
IEEE
2013-04-08
[77]
뉴스
dv/dt Simulation Scenario 1: SiC Drive – dv/dt Simulation and Mitigation
https://dvdtfilter.c[...]
2018-10-18
[78]
문서
Skibinski
[79]
웹사이트
The Basics of Variable-Frequency Drives
http://ecmweb.com/po[...]
EC&M
2012-04-18
[80]
논문
Output filters for PWM drives with induction motors
1998-01-01
[81]
뉴스
Motor Voltage Waveform Simulation - dv/dt Simulation and Mitigation
https://dvdtfilter.c[...]
2018-10-18
[82]
서적
IEEE Geoscience and Remote Sensing Letters
IEEE
[83]
웹사이트
Application Report Long Drive/Motor Leads
https://www.yaskawa.[...]
2012-02-14
[84]
논문
Audible Noise and Losses in Variable Speed Induction Motor Drives: Influence of the Squirrel Cage Design and the Switching Frequency
[85]
웹사이트
Who Cares About Carrier Frequency?
http://www.reliance.[...]
2012-02-15
[86]
웹사이트
Minimize Adverse Motor and Adjustable Speed Drive Interactions | Advanced Manufacturing Office Energy Efficiency and Renewable Energy | U.S. Department of Energy
http://www.nrel.gov/[...]
[87]
뉴스
Bearings and Electricity Don't Match
http://www.plantserv[...]
PtmanMedia
2008-04-16
[88]
웹사이트
Bearing Currents in Modern AC Drive Systems – Technical Guide No. 5
http://www05.abb.com[...]
2011-06-14
[89]
서적
2008 11th International Conference on Optimization of Electrical and Electronic Equipment
IEEE
[90]
웹사이트
Technical Guide No. 8, pp. 26–30
https://library.e.ab[...]
[91]
웹사이트
Evaluation of 2010 Toyota Prius Hybrid Electric Drive System
http://ecee.colorado[...]
Oak Ridge National Laboratory
2012-09-26
[92]
웹사이트
Reliance Electric FlexPak 3000 20FR4042 Automation Industrial
https://20fr4042.com[...]
2023-12-09
[93]
서적
Fundamentals of Electrical Drives
Alpha Science Int.
[94]
문서
Rashid
[95]
문서
Campbell
[96]
문서
可変電圧可変周波数制御#概要を参照
[97]
웹사이트
停動トルク
http://www.orientalm[...]
2015-09-20
본 사이트는 AI가 위키백과와 뉴스 기사,정부 간행물,학술 논문등을 바탕으로 정보를 가공하여 제공하는 백과사전형 서비스입니다.
모든 문서는 AI에 의해 자동 생성되며, CC BY-SA 4.0 라이선스에 따라 이용할 수 있습니다.
하지만, 위키백과나 뉴스 기사 자체에 오류, 부정확한 정보, 또는 가짜 뉴스가 포함될 수 있으며, AI는 이러한 내용을 완벽하게 걸러내지 못할 수 있습니다.
따라서 제공되는 정보에 일부 오류나 편향이 있을 수 있으므로, 중요한 정보는 반드시 다른 출처를 통해 교차 검증하시기 바랍니다.
문의하기 : help@durumis.com